 Ascend Studio
Ascend Studio






MOBILE ROBOTS
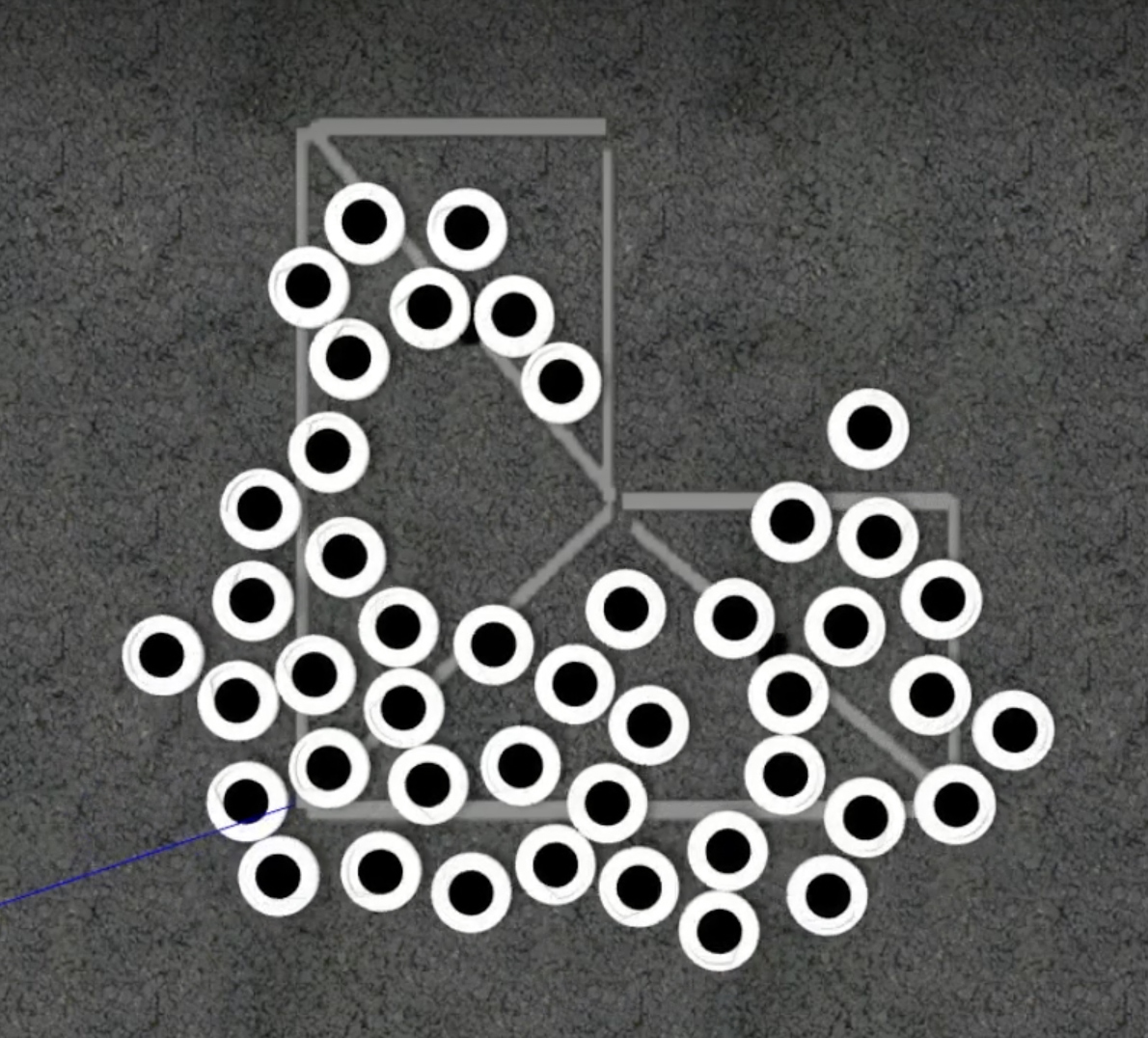
- Autonomous Packing of Simple Polygons: A swarm of ground robots autonomously pack polygonal shapes as tightly as possible. The challenges are in developing collision avoidance algorithms that prevent the occurrence of deadlocks and livelocks. This project finds applications in defense and warehousing applications. (Completed)
- Cooperative Collision Avoidance: With the use of relative velocity-based potential fields, two or more mobile robots, both ground and aerial, that can potentially collide, collision avoidance maneuvers are designed that lead to emergent cooperative behaviors. This is akin to the way vehicles move around a roundabout at a busy intersection. (Completed)
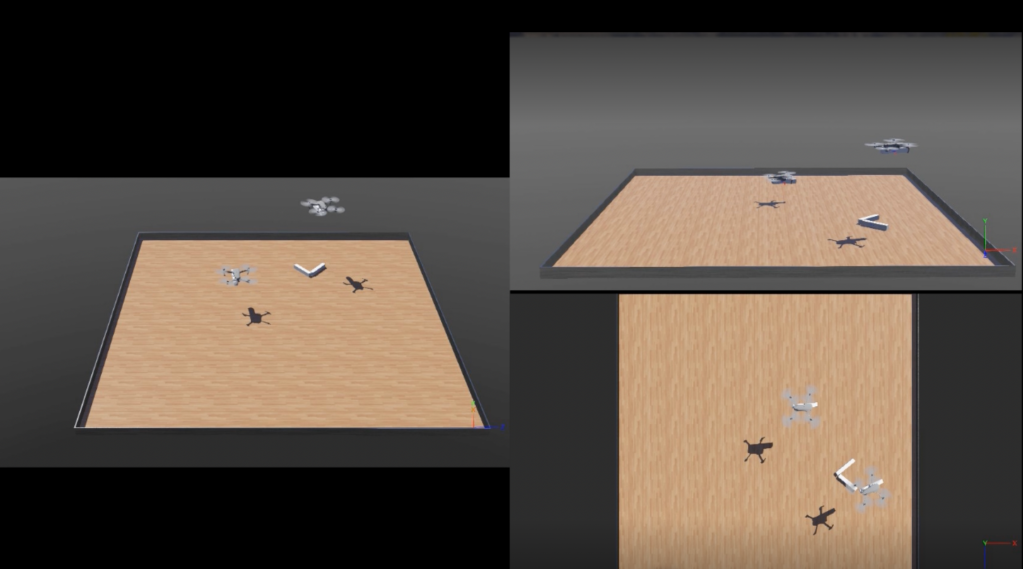
- Collaborative Construction: Algorithms that borrow concepts from State Machines as well as Collision Avoidance Techniques, are designed to enable several drones to assemble a structure autonomously. The target pick and place locations of the pieces needed for the assembly are provided to the drones and they assemble the structure while avoiding colliding with each other and staying within a restricted environment (geo-fencing). (Completed)
- Computer Vision in Navigation: Algorithms that enable a ground robot to track a colored line using an on-board Kinect camera are developed. By changing the desired color of the line to be tracked, the robot can navigate in environments where differently colored lines intersect. In related work, a robot can track a mobile object using only a monocular camera. The object to be tracked is defined in a parametric form based on a few points identified from its image. (Completed)
- Autonomous Navigation in GPS-denied environments: This is the standard SLAM problem encountered in robot navigation, where a robot has to locate and map the environment in which it operates. The challenges are in developing and implementing, with limited hardware, real-time and autonomous SLAM and with the use of markers in the environment. (On-going)
ROBOTIC GRIPPING
- Smart Harness for an Exoskeleton: These devices are developed to aid in physical rehabilitation of the lower limbs. These are attached to the human body using straps that prove to be uncomfortable to the user in different body postures. The harness is expected to replace the straps and also conform to changing body shapes and motions of the human limbs. A prototype has been built for the foot. (Funding awaited for extensions)
- Universal Gripper: A rubber bag containing coffee beans that can be pressurized has been demonstrated by physicists to act as a gripper that can grip a wide variety of objects. This gripper uses the principle of jamming where the granules (coffee beans) aid in the manipulation of objects, such as lifting them, by simply removing the air in the empty space in the rubber bag. The lab is currently building such a gripper prototype for use in warehouses. (On-going)
- Human-Robot Interaction: A robotic manipulator that aids a human operator in the performance of repetitive tasks, such as seen in manufacturing, is being developed. It is the human operator that performs the actions of moving the payload, such as a tool, while the robot ensures that deviations from a planned path are minimised. The robot provides a haptic feedback to the operator and becomes active only when the deviations approach a pre-defined threshold. This system also finds applications in rehabilitation. Now, the therapist can define a set of paths in 3-D space that have to be traced by the patient, the robot ensures that the patient does not deviate from these pre-defined paths.
THEORY
- Consensus protocols in dynamic agents: Resilient consensus protocols, as defined in the academic literature, are developed for a multi-agent system where one or more of the agents are malicious or Byzantine. A sliding-mode control-based resilient consensus protocol is developed for agents with first-order dynamics that does not require the number of malicious/Byzantine agents to be known by other agents in the network. A message passing algorithm, designed using concepts in Distributed Computing, is implemented in the consensus protocol. A blockchain implementation is also being developed with the aim of being able to identify malicious agents in a multi-agent system framework.
-
Cooperative Load Carrying by Unmanned Aerial Vehicles: Concepts from the guidance literature are used to design a sliding-mode-based guidance law for a pair of Unmanned Aerial Vehicles (UAVs) that are rigidly connected to manipulate a payload in 2-D and 3-D spaces. The proposed law removes the need for communication between the 2 UAVs and can be applied for object delivery and retrieval from moving platforms.
-
Applications of Cryptography and Control: With the availability of the internet and network infrastructure, feedback control systems can be implemented such that the control policies and parameters can be stored in the cloud. Homomorphic encryption schemes can be applied so that a wide variety of control policies can be implemented on encrypted data; the use of such schemes for polynomial-control policies has been developed. It is also shown that by attacking the part of the network that acts as input to the actuators, the control parameters and types can be revealed if they are implemented using homomorphic encryption schemes.